|
Andrea Tagliabue I am an Applied Scientist working on robotic manipulation at Amazon Robotics, where I develop model-based and learning-based methods for perception, planning, and control in real-world systems. I received my Ph.D. from LIDS at MIT in 2024, focusing on imitation learning for robust, adaptive, agile sensing and control under uncertainty. My research lies at the intersection of learning and control, spanning foundation models for robotics, data-efficient imitation and reinforcement learning, and learning-based model predictive control. Prior to MIT, I was a robotics engineer affiliate at the NASA Jet Propulsion Laboratory and Caltech, contributing on state estimation for the DARPA Subterranean Challenge. I earned my M.S. in Robotics from ETH Zürich, was a visiting researcher at UC Berkeley, and received my B.S. in Automation Engineering from Politecnico di Milano. |

|
Selected Publications |
|

|
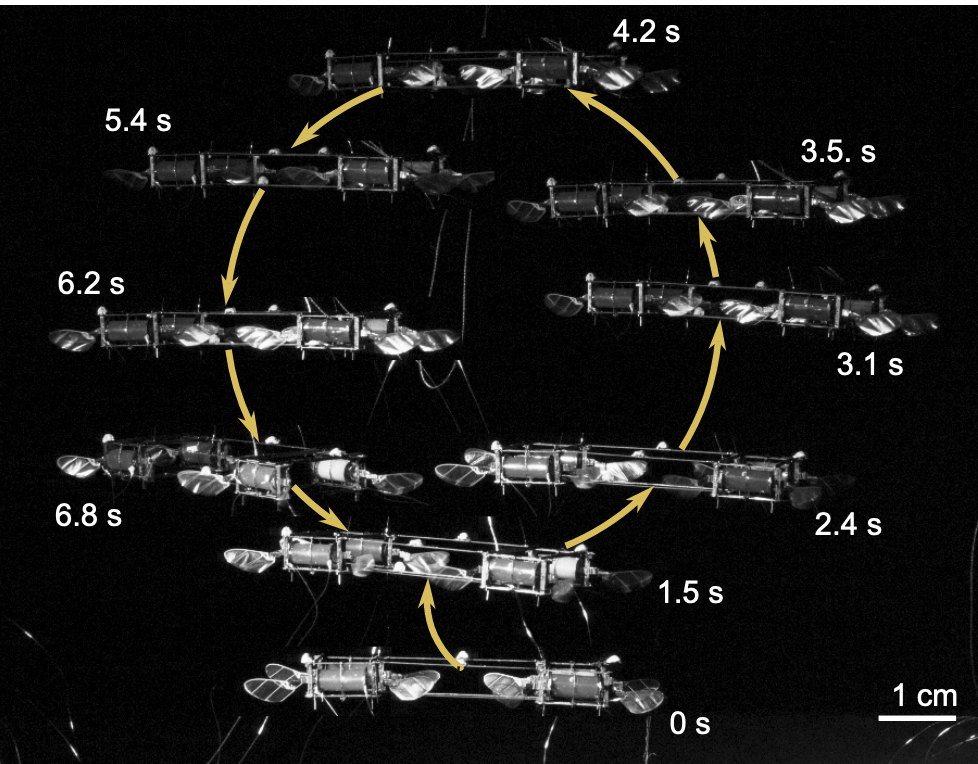
Aerobatic maneuvers in insect-scale flapping-wing aerial robots via deep-learned robust tube model predictive control
Yi-Hsuan Hsiao*, Andrea Tagliabue*, Owen Matteson*, et al. Science Advances (Sci. Adv.), 2025 (High impact factor journal) On a 750 mg flapping-wing robot, this controller reaches 197 cm/s and 11.7 m/s² saccades (447% and 255% above prior results), tolerates 160 cm/s wind, and executes 10 flips in 11 s. |
|
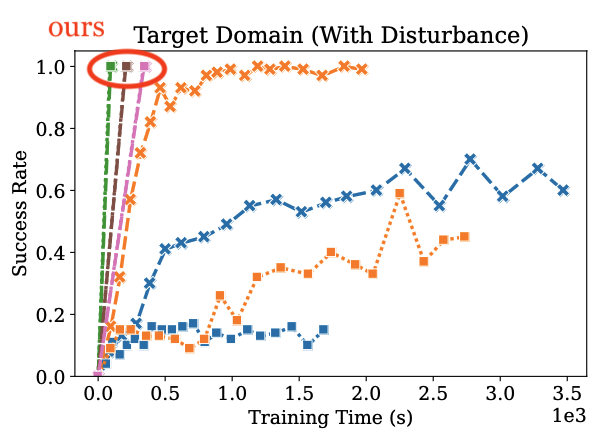
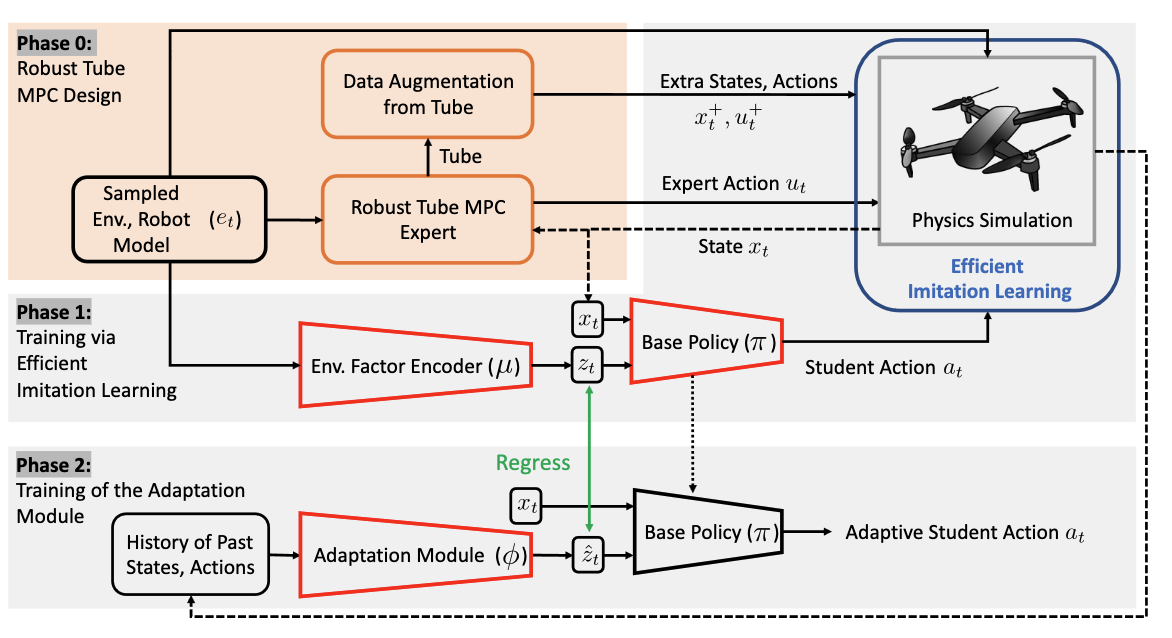
Efficient Deep Learning of Robust Policies from MPC using Imitation and Tube-Guided Data Augmentation
Andrea Tagliabue, Jonathan P. How IEEE Transactions on Robotics (T-RO), 2024 This method enables zero-shot transfer from a policy trained on a single robust-MPC demonstration, substantially reducing data collection and training effort while preserving robustness to unseen perturbations. |
|
Tube-NeRF: Efficient Imitation Learning of Visuomotor Policies from MPC using Tube-Guided Data Augmentation and NeRFs
Andrea Tagliabue, Jonathan P. How Robotics and Automation Letters (RA-L), 2024 Tube-NeRF reports an 80x gain in demonstration efficiency, 50% lower training time, and only 1.5 ms onboard inference for robust vision-based multirotor tracking. |

|
Nebula: Quest for robotic autonomy in challenging environments; team costar at the DARPA Subterranean Challenge
Ali Agha et al., Andrea Tagliabue Journal of Field Robotics (JFR), 2022 2nd-place (Tunnel 2019) and 1st-place (Urban 2020) DARPA SubT finishes. NeBula was fielded across wheeled, legged, and aerial robots, and supported CoSTAR’s 2nd-place (Tunnel 2019) and 1st-place (Urban 2020) DARPA SubT finishes. [paper | video | project webpage] |
|
Rapid Imitation Learning of Robust Adaptive Trajectory Tracking Policies
Tong Zhao*, Andrea Tagliabue*, Jonathan P. How IROS, 2023 The adaptive policy is learned in about 1.3 hours and achieves 6.1 cm average position error under winds near 50% of robot weight, including disturbances 36% beyond training. |
|
Robust, high-rate trajectory tracking on insect-scale soft-actuated aerial robots with deep-learned tube MPC
Andrea Tagliabue*, Yi-Hsuan Hsiao*, et al. ICRA, 2023 (Awarded Finalist for the Best Paper in Dynamics and Control) On a 0.7 g SoftFly platform, this controller achieves <1.8 cm position RMSE in challenging maneuvers and reduces maximum position error by 60% versus prior work. |
|
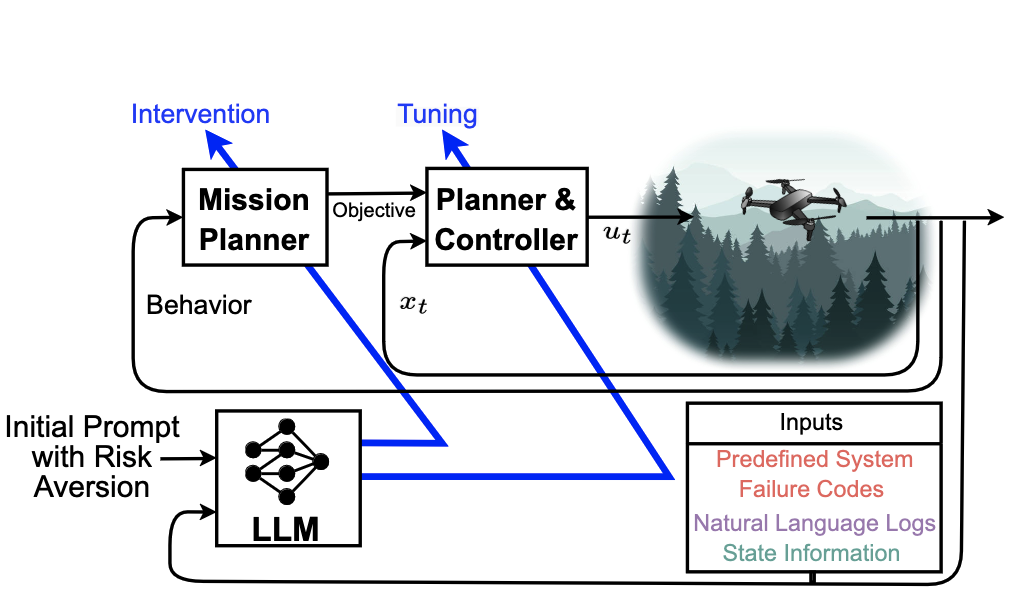
REAL: Resilience and Adaptation using Large Language Models on Autonomous Aerial Robots
Andrea Tagliabue*, Kota Kondo*, Tong Zhao*, Mason Peterson*, Claudius T Tewari, Jonathan P. How CoRL Workshop, 2023 and CDC, 2024 REAL integrates LLM reasoning into real multirotor mission and control loops at 0.1-1.0 Hz, reducing tracking error under controller-parameter mismatch and unmodeled dynamics. [paper] |

|
Lion: Lidar-inertial observability-aware navigator for vision-denied environments
Andrea Tagliabue*, Jesus Tordesillas*, Xiaoyi Cai*, et al. ISER, 2021 (1st Place Urban Circuit, DARPA Subterranean Challenge) LION fuses high-rate IMU and low-rate lidar in a fixed-lag smoother with online extrinsic calibration and observability-aware confidence, enabling robust field deployment in GPS-denied subterranean settings. |
|
Robust Collaborative Object Transportation Using Multiple MAVs
Andrea Tagliabue*, Mina Kamel*, Roland Siegwart, Juan Nieto International Journal of Robotics Research (IJRR), 2019 This work demonstrates robust collaborative payload transport by multiple mechanically coupled MAVs without explicit inter-agent communication, validated through extensive simulation and flight experiments. [paper | video | teaser video] |
|
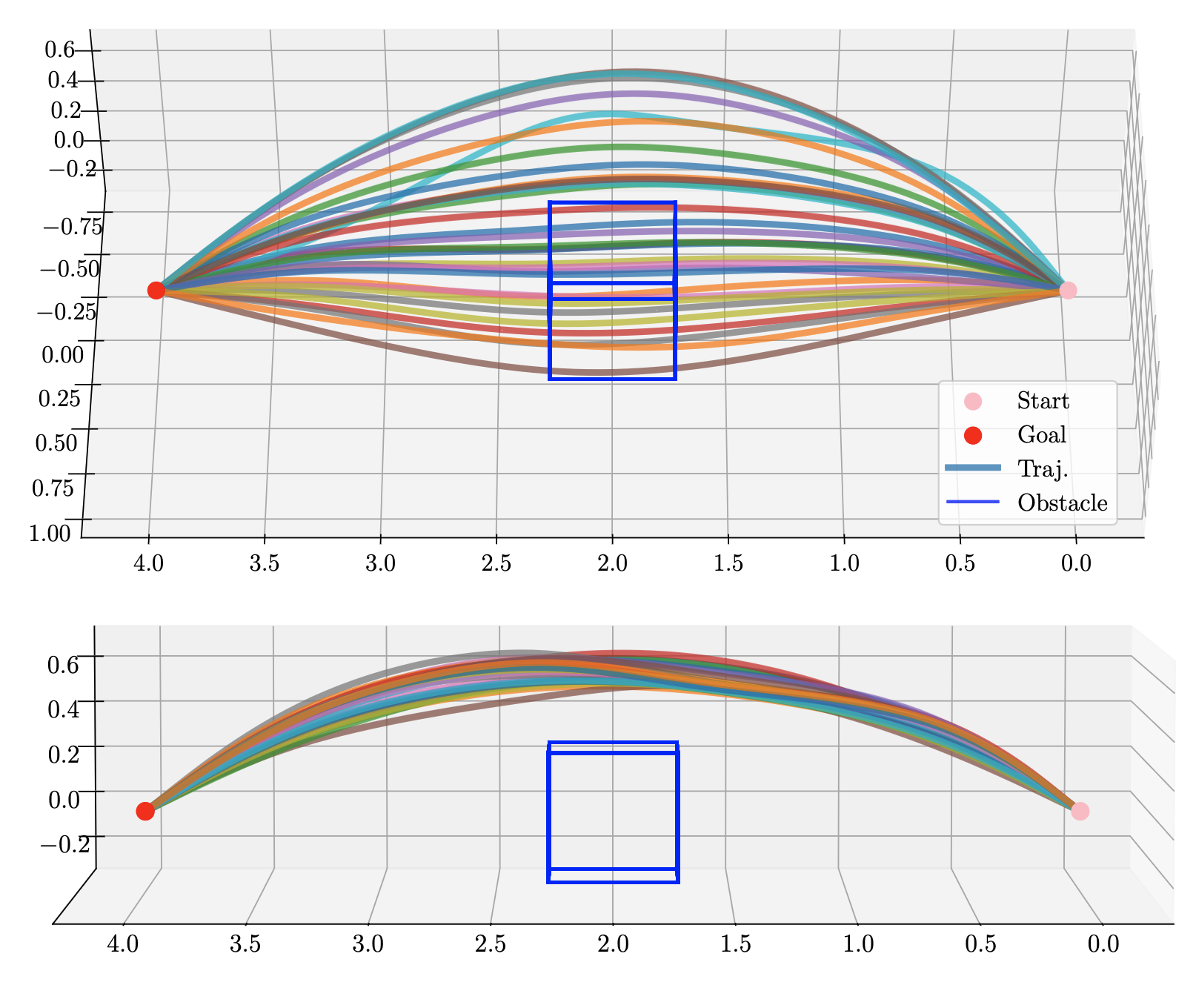
CGD: Constraint-Guided Diffusion Policies for UAV Trajectory Planning
Kota Kondo, Andrea Tagliabue*, et al. ArXiv, 2024 CGD combines diffusion policies with online surrogate optimization to generate collision-free, dynamically feasible trajectories and improves feasibility/performance under unseen constraint changes. [paper] |
In the News1. MIT News (Dec 3, 2025), "MIT engineers design an aerial microrobot that can fly as fast as a bumblebee" - link. 2. NASA 360, "Shapeshifting Robots" - link. 3. CNN Business, "Shape-shifting robots could one day explore distant worlds." - link. 4. Vimeo NASA Robotics Showcase - link. 5. DARPA Subterranean Challenge / CoSTAR coverage (DARPA + NASA CoSTAR) - DARPA and CoSTAR. 6. ETH Zurich ASL News (Mar 2017), "The ASL and RSL showed an outstanding team performance at the MBZIRC Challenge in Abu Dhabi" - link. |
Academic ServiceReviewer for CORL, L4DC, T-RO, RA-L, ICRA, IROS, CDC, Int. Journal Robust and Nonlinear Control. |
MentorshipI had the honor to work with several brilliant students, including: Tong Zhao (M.S., MIT), Owen Matteson (B.S., MIT), Lucas Jia (M.S., MIT) I also provide occasional pro-bono consulting in robotics to early-stage startups and students in a personal capacity outside my primary employment; if interested, please reach out via email. |